V291 can be installed in the following ESC models:![]() RS SPEC GEN3
RS SPEC GEN3
![]() RS GEN3
RS GEN3
![]() RS PRO 1S Black Edition
RS PRO 1S Black Edition
![]() RS PRO Black Edition
RS PRO Black Edition![]() RSX PRO
RSX PRO
![]() RX4
RX4
![]() RX8 GEN3
RX8 GEN3

- NEW Power Profiles
- Save and Import Custom Power Profiles
- Improved Throttle and Brake Feel
- SPEC Motor Optimized Setting

This page provides all the information that you will need to understand your Tekin Brushless ESC settings. This will be updated with any changes as needed. We will list the settings per tab as you go through the Tekin Hotwire interface either on Windows, Android, or Apple.
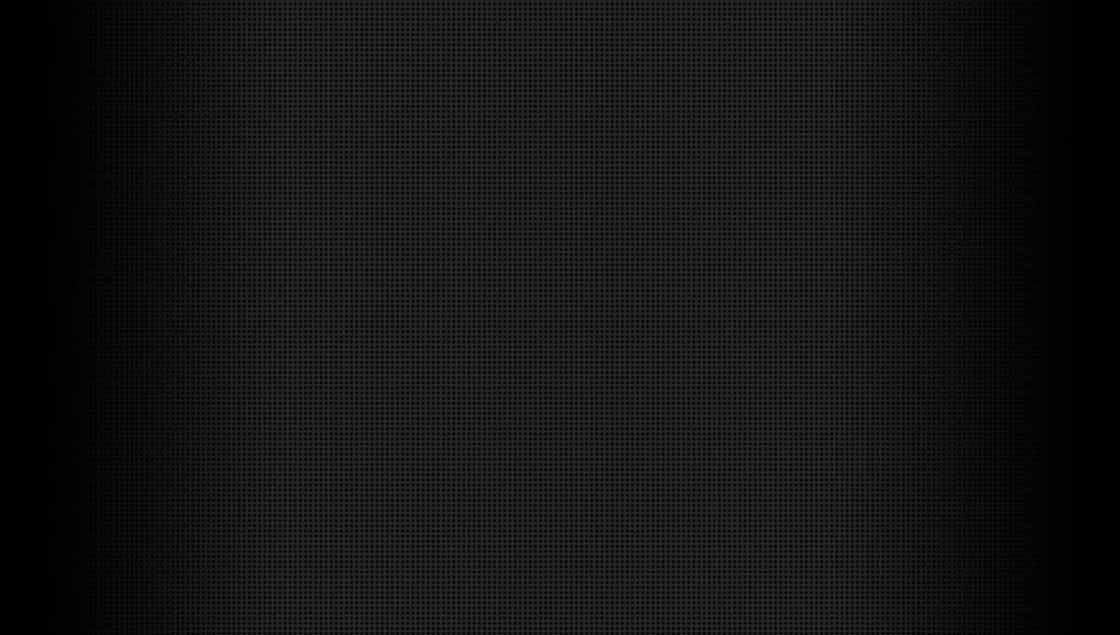
The Dashboard is a snap shot where you will see all your settings in one place. It’s a great place to take quick look at your settings. You will see this first when plugging into a Tekin ESC. Note that you can mouse-over on any of the settings by simply putting your mouse pointer onto the text of the setting you want to learn more about. Once you’re in one of the five tabs you can also right click on any of the sliders to see the corresponding default LED settings. The Dashboard will look different from one ESC to the next as they do not all have the same settings and adjustments available across all platforms.

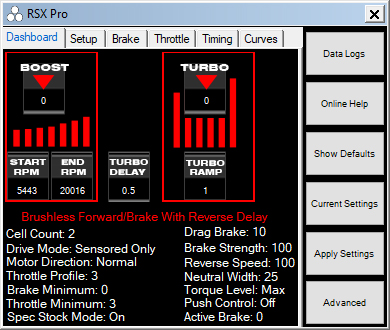
Dashboard Expanded
MODEL
Current connected ESC model.
CURRENT VERSION
Firmware Version currently loaded in the ESC.
SERIAL NUMBER
Serial Number for ESC identification.
DATA LOGS
The Data Logs button will initiate the Data Logs interface and allow the user to read, download, and save data logs. For more info on this click HERE. As of 15.16.1 with V276, Data Logging is OFF by default. To turn Logging on, click Data Logs to open up the Data Analyzer. Plug your ESC in, click Data, then click Download. When the data loads, it will be blank. Click Logging, then click Sample Rate and choose how frequently you would like the ESC to capture data. Faster rates take up more space, so you may need to adjust the sample rate if you need to record longer logs.
ONLINE HELP
Clicking this button will take you to the Tekin FAQ section of our website.
SHOW DEFAULTS
Clicking this button will show the default ESC settings for the ESC connected. If you want to simply reset the esc clicking on this then Apply Settings will apply the default settings.
CURRENT SETTINGS
Clicking this button will show the current settings programmed into the ESC.
APPLY SETTINGS
Clicking this button will Apply any setting changes that the user may have selected while connected to the ESC.
ADVANCED
Clicking the Advanced button will expand the Hotwire interface allowing the user to see the Current Version of software installed in the ESC. It will also show Other Versions if any are available for the ESC. The current ESC connected will be shown as well as the product serial number. Keep this written down somewhere as it could help you identify your ESC if it is every lost or stolen.
UPDATE ESC
Flashes the selected firmware version to the ESC. Don't click this to save settings as it will reflash the firmware and return the ESC to default settings.
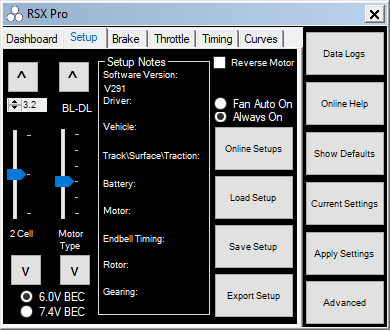
VOLTAGE CUTOFF
The top box that is default 3.2 is the per-cell voltage you can program. By default Tekin sets this to 3.2v which is the industry accepted standard for voltage cut off per cell.
The Slider allows you to set the cell count to the proper setting. 1 for 1 cell, 2 for 2 cell, so on and so forth. Note: we do not have an auto setting so be sure to set the proper cell count.
MOTOR TYPE
This slider allows you to choose what motor drive type you want and your reverse and braking preference.
BL-FW - Brushless FWD/BRK No Reverse
BL-F/R - Brushless Forward to Immediate Reverse
BL-DL - Brushless FWD/BRK/REV Delay
BR - FW - Brushed FWD/BRK No Reverse
BR - F/R - Brushed Forward to Immediate Reverse
BR - DL - Brushed FWD/BRK/REV Delay
SETUP NOTES
This section allows the user to save his/her profile with a full complement of notes. You can then save this profile on your own device, share with others via email, etc.
REVERSE MOTOR
This check box simply reverses the motor direction for models that may require it.
FAN AUTO / ALWAYS ON
These to radio circles allow the user to choose how the fan is controlled. By default as of 255 the fan is always on, which allows the HotWire 3.0 to connect anytime you want. Choosing Fan Auto On will only turn the fan on briefly when powered up, then on as the ESC requires which initiates it at approximately 140F.
BEC
You can choose between a 6V BEC output or go high voltage by selecting the 7.4V BEC option. This can be used to increase servo speed and torque.
ONLINE SETUPS
Clicking this takes you to our website setup page where you can find team drivers setups.
LOAD SETUP
Clicking this will open up a window where all your stored/saved setups are saved (default).
SAVE SETUP
Fill out the “Setup Notes” area and then save your favorite setups right onto your device (Only Windows at this time).
EXPORT SETUP
Clicking this “exports” your current setup to your “My Documents” folder on your device (Only Windows PC at this time).
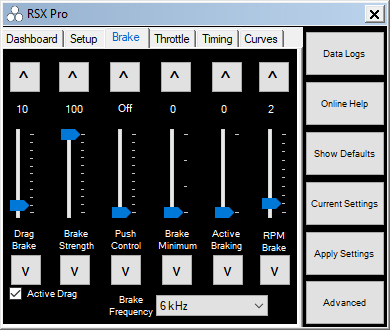
DRAG BRAKE
Drag brake also known as coast brake or auto brake is braking power applied by the ESC anytime the ESC sees a valid neutral signal from the transmitter. The higher the value, the more drag brake is applied. You can drag the slider up/down and or right click to see the default LED settings which you would get from using the on board button selections. Note: on some radios a neutral width setting that is too low may cause erratic Drag Brake operation.
ACTIVE DRAG
Active Drag is a Drag Brake enhancement. Normal Drag Brake only activates when the ESC is in neutral and you are not applying any brake or throttle. Active Drag applies Drag Brake all the time, not just in neutral. This gives you a greater sense of drag in your drive train and slows the vehicle down as you roll off throttle towards neutral. For rock crawling and scale vehicles this aids in controlling vehicle descent speed on slopes and increases control immensely. In racing applications this added drag can feel more like a brushed motor and give you better braking control entering corners. It eliminates the transition period from throttle to brake as they both happen simultaneously.
Active Drag works in both brushless and brushed motor drive modes.
BRAKE STRENGTH
Brake Strength is the total brake power the ESC will provide the motor. Higher values will give more power, vice versa for lower settings.
Note: Prior to 255 using the buttons on this setting would also adjust reverse speed.
PUSH CONTROL
Push Control is the opposite of Drag Brake. This setting will add an active amount of creep or coast to the motor. The higher the value, the more push the motor will be given which can negate motor cog torque, excessive drive train drag, or simply help a car gain more corner speed. This setting is only “active” while the ESC receives a valid neutral signal. The longer WOT or wide open throttle is seen by the esc, the more push the user will receive. This allows for slower corners to feel the same as a high speed sweeper. Note: on some radios a neutral width setting that is too low may cause erratic Push Control operation.
BRAKE MINIMUM
Brake Minimum or initial brake is the minimum brake power the ESC will apply to the motor when the user induces a brake application also known as push brake. If you want a stronger initial brake hit use a higher value. Use a lower value or 0 to have a softer brake application.
RPM BRAKE
RPM Brake is an intelligent braking setting that monitors motor RPM and adjusts the brake strength accordingly. Set your Brake Strength where you like it and increase the RPM Brake setting to increase brake power at lower speeds if needed. RPM Brake does not affect your maximum Brake Strength setting.
ACTIVE BRAKE
Active Brake is a setting that provides additional brake power when the user initiates a rapid brake input or panic brake. Smooth applications of the brake are NOT affected. This setting can be useful in off-road where you may need extra brake power to snap down the attitude of the car over jumps; for example in 2wd SC Truck but do not want your regular push brake power affected.
BRAKE FREQUENCY
Brake Frequency changes the pulse width being applied during braking. In general higher frequencies provide a softer brake power/feel with a more usable range of trigger motion allowing for better brake modulation while keeping full brake power overall. Lower frequency gives stronger brakes with a stronger overall feel.

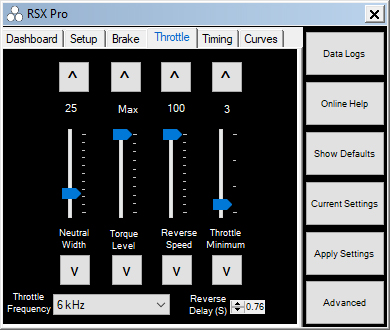
NEUTRAL WIDTH
Neutral Width adjusts the ESC’s sensitivity to the neutral signal the radio system provides. Lower settings will provide a much more sensitive trigger feel. Higher settings will allow for a little trigger travel before engaging throttle or brake. Note: Setting that are too low for a particular radios system may cause erratic Drag Brake, Push Control, or even “arming” issues. If you experience any of these, try increasing your Neutral Width setting first.
TORQUE LEVEL
Torque Level replaces the Current Limiter setting found in software prior to 255. Torque adjusts the amount of force the motor generates under heavy acceleration. Higher values provide more torque, lower values provide less torque. Settings as low as 4, 5 or 6 are very good in loose conditions with mod motors. 7 and 8 feel good in high bite. In Spec racing you will likely set it to 10 and max torque if there is decent traction. You can only set 4 to 10 on the unit, but you can set 1 to 10 in the HotWire. On the unit led 1 is torque level 4, led 7 is torque level 10 and max.
REVERSE SPEED
Reverse Speed adjust the amount of power in reverse. Higher values will give more power and speed while in reverse, lower values less power and speed. Note: If Brake Strength is later adjusted using the on board buttons, Reverse Speed settings set via the Hotwire will be discarded.
THROTTLE MINIMUM
Throttle Minimum is the minimum throttle power the ESC will apply to the motor when the user induces a throttle application. If you want a stronger initial throttle “hit” use a higher value. Use a lower value or 0 to have a softer throttle application. For Spec racing this setting will increase punch feel.
THROTTLE FREQUENCY
Throttle Frequency changes the pulse width being applied during throttle application. In general higher frequencies provide a softer throttle power/feel with a more usable range of trigger motion allowing for better throttle modulation while keeping full throttle power overall. Lower frequency gives stronger throttle with a stronger overall feel.
REVERSE DELAY
Reverse Delay allows the user to choose how long he/she must wait in neutral until reverse power is available to be applied to the motor. The lower the setting, the less time is required to spend at neutral before reverse power is applied. More time will help protect the drive train of the car preventing wear and tear.

TIMING PROFILE
DUAL MODE
All Tekin brushless ESCs can run in Dual Mode, which uses motor sensors to start the motor smoothly and then switches to sensorless drive at higher RPM for efficiency. The RX4 and RX8 series ESCs are Dual Drive Only controllers, meaning that they do not support sensored-only operation and do not have Boost or Turbo features. There are 7 Timing Profiles available on the RX4 and RX8 controllers with 1-5 increasing sensorless timing advance and C1 and C2 being user-programmable via the HotWire. The Timing Profiles on Dual Drive ESCs work as such:
TP1 - 5° Advance RPM - 5443-20,016
TP2 - 10° Advance RPM - 5443-20,016
TP3 - 15° Advance RPM - 5443-20,016
TP4 - 20° Advance RPM - 5443-20,016
TP5 - 25° Advance RPM - 5443-20,016
TP6 - Custom 1
TP7 - Custom 2

TIMING PROFILE SENSORED ONLY
(RS Gen3, RS PRO 1S, RS PRO, RSX PRO)
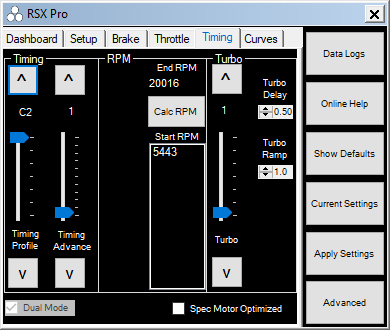
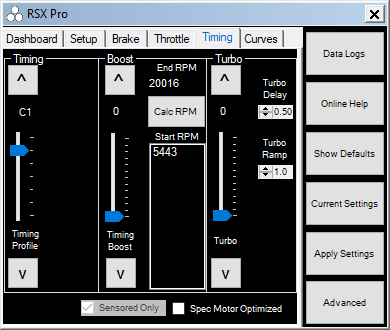
There are 7 default Timing Profiles. RS Series (except RS SPEC) and RSX provide 5 default profiles starting with zero timing spec or blinky mode as well as 4 other Timing Profiles with increasing amounts of boost timing. Timing Profile C1 and C2 are custom or user programmable profiles which are stored inside the ESC and allow the user to change from or to these using the on board button interface once they’re programmed. Note that C1 is a Sensored Only profile by default, and C2 is a D2 Dual Mode profile. Sensored Timing Profiles on these ESCs work as such:
TP1 - Blinky Mode No Timing
TP2 - 15° Boost RPM - 5443-20,016
TP3 - 25° Boost RPM - 5443-20,016
TP4 - 35° Boost RPM - 5443-20,016
TP5 - 45° Boost RPM - 5443-20,016
TP6 - Custom 1 Sensored Only
TP7 - Custom 2 Dual Mode
If the user selects one of the two available Timing Profiles you will gain access to additional sliders described below. Timing Profile C1 is a “Sensored only” profile and gives the user the following additional Turbo and Boost adjustments.
BOOST:
Boost is additional timing which is applied to the motor using the Start and End RPM’s set by the user. More timing will increase the kV of a motor, less timing or no timing will reduce the kV.
Note: Boost adds to the set timing on the motor, and any Turbo set, increasing Global Timing. Global Timing is all timing adjustments added together: Motor Can Timing + Boost Timing + Turbo = Global Timing. We recommend NO MORE than 60° of timing be used in any application. Excessive timing may cause damage to the motor or ESC and gearing will need to be adjusted to account for the higher RPM. Use with caution.
RPM:
RPM gives you the option to set the RPM range at which the Boost is applied. Default is 5,443-20,016 and a good place to start with any setup. Choose an End RPM and the software will calculate options for Start RPM values.
TURBO:
Turbo is additional motor timing which is applied to the motor and is activated by the user hitting WOT or wide open throttle once the turbo delay time has expired.
Note: Turbo adds to the set timing on the motor and any Boost set, increasing Global Timing. Global Timing is all timing adjustments added together: Motor Can Timing + Boost Timing + Turbo = Global Timing. We recommend NO MORE than 60° of timing be used in any application. Excessive timing may cause damage to the motor or ESC and gearing will need to be adjusted to account for the higher RPM. Use with caution.
TURBO DELAY:
Turbo Delay is the amount of time spent at WOT or wide open throttle the ESC must see form the transmitter before Turbo Timing will be supplied to the motor. Lower delay settings apply Turbo Timing sooner, higher settings provide more delay.
TURBO RAMP RATE:
Turbo Ramp Rate is the rate in which Turbo Timing is applied to the motor. Higher values apply Turbo Timing quicker than lower settings.
DUAL MODE
Tekin Dual Mode is a hybrid drive mode that uses motor sensors to start the motor smoothly and then transitions to Sensorless drive at higher RPM for efficiency. This mode is recommended for 4-pole motors and also works great for drag racing applications running motors lower than 4.0T. Sensored Boost and Turbo timing are not available in Dual Mode. Motor can timing is not used in Dual Mode and has no affect on motor RPM.
SENSORED ONLY
Sensored uses motor sensors 100% of the time and allows you to use Timing Boost and Turbo functions.
LOCKED SPEC MODE
Locked Spec Mode disables the ability to change timing profiles using the on board programming buttons and LED tree. This mode also flashes a special neutral signal, using LEDs 3-4-5 blinking rapidly in between temperature readings. This mode is to make it easy for tech to identify that the ESC is in "Blinky" mode and that it cannot be changed without using a HotWire device.

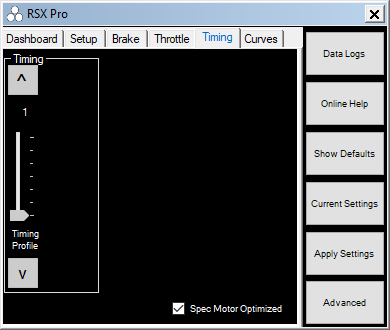
SPEC MOTOR OPTIMIZED
Check Box Sets the ESC for Locked SPEC "Blinky" Mode. Optimizes ESC motor drive for SPEC class motors. This Mode can only be set via HotWire and cannot be undone on the ESC using the QuickTune buttons and LED bar. The ESC will flash LEDS 3-4-5 rapidly while in neutral in between temperature readings.

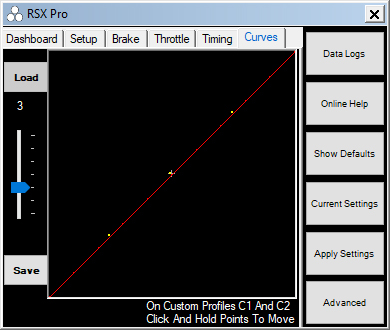
The Curves slider provides 5 preprogrammed throttle curves and comes defaulted in linear profile 3. Profile 6 can be used to create custom power curve profiles.
PROFILE 1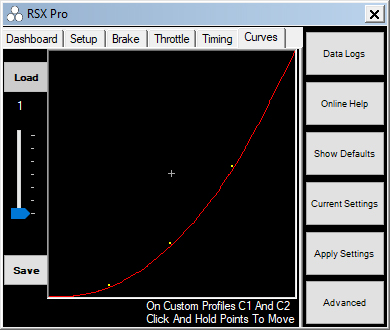
MILD - Profile 1 provides the softest feeling low end and mid throttle. Useful for very low traction situations.
PROFILE 2
MEDIUM - Profile 2 provides a moderate low end and slightly softer mid throttle.
PROFILE 3
LINEAR - Default throttle profile provides linear trigger to throttle relationship.
PROFILE 4
STRONG - Profile 4 provides a slightly more aggressive low end mid range throttle. Useful for higher traction or applications that need a more punchy low end.
PROFILE 5
AGGRESSIVE - Profile 5 provides the most aggressive low to mid range throttle feel. Typically used in stock racing applications to provide the most punchy low end.
PROFILE 6
CUSTOM - HotWire 15.40.9 introduces Power Profiles, yet another tuning option for your Tekin ESC. The Power Profiles allow you to manipulate the esc output vs the trigger position (radio signal). By doing so, you have full control over the trigger-to-motor relationship throughout the full range of the throttle. Add up to 64 control points from 1% to 100% throttle and move each point up or down to change the ESC output at that throttle percentage and move each point sideways to control the radio throttle percentage at that ESC output.
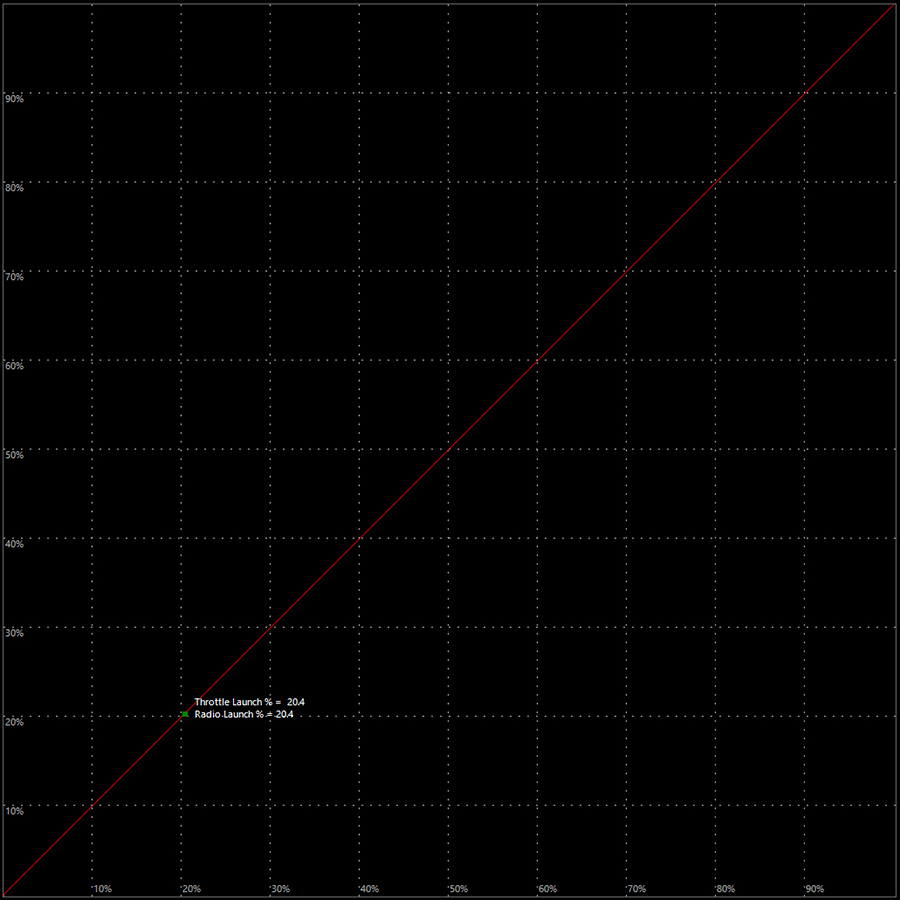
Now this may seem very overwhelming at first, but it’s actually very simple and we will use a 10 point custom profile to demonstrate what this changes. This is the default curve – it’s not a curve. Right now the Radio Input and ESC % Output are in sync. While this looks great, the end result is that this is not actually giving us a linear Power profile. To get a more linear power response, or a response that just feels better, we have to make some adjustments.
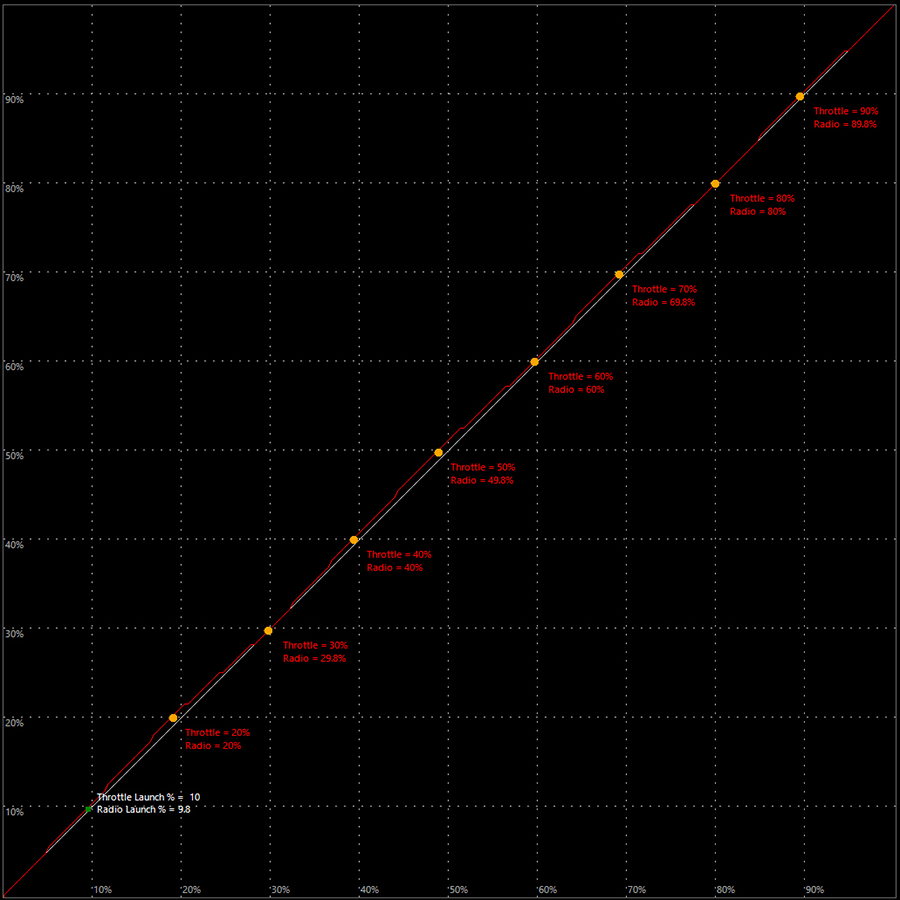
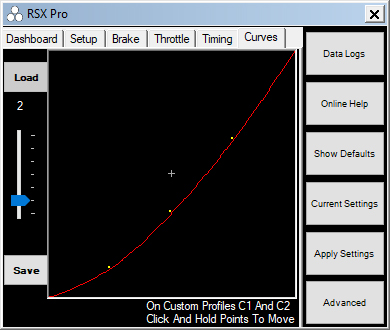
Now I’ve added in control points every 10% that I would like to adjust to start making the custom response curve. You can use as many points as you'd like, up to 64 total. 10 on 10 works great for tuning off-road and on-road throttle response curves and if you're drag racing, you'll likely want more of them in the 20-50% range to better control the throttle.
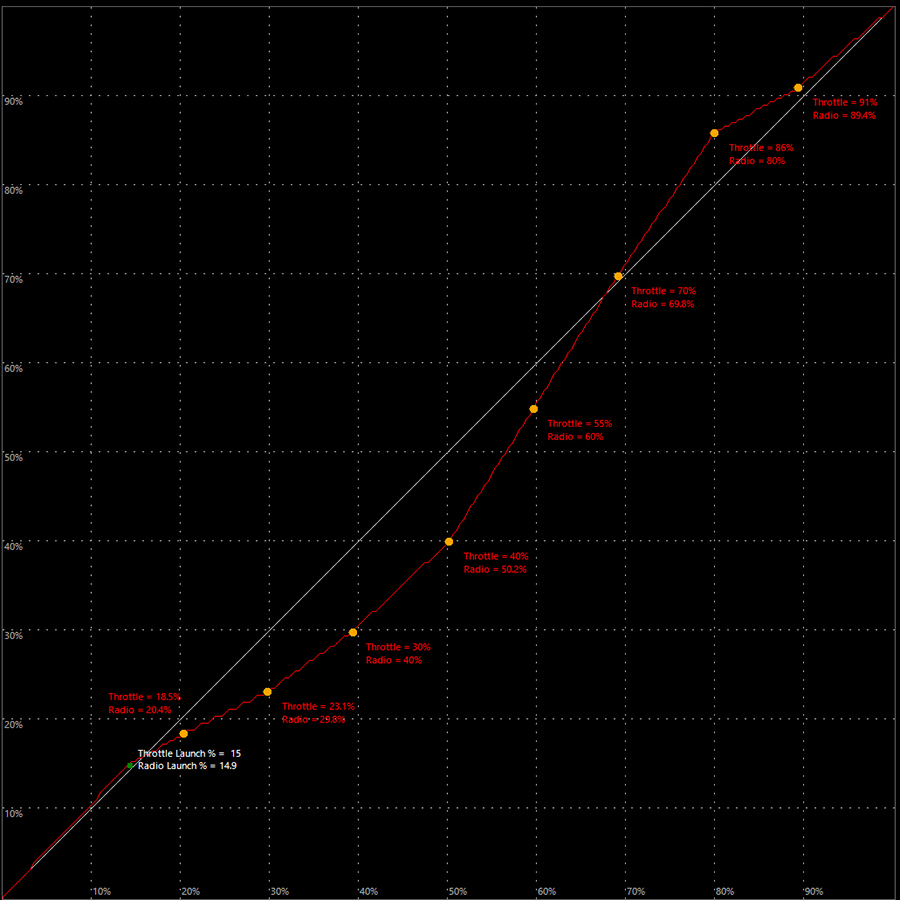
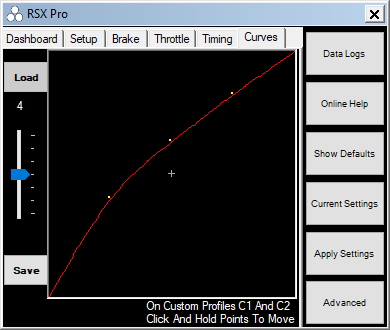
The Launch Point is where I will start making adjustments. Since this is a T8 4 Pole motor on 4S, I’ve began to adjust the response at 15%radio throttle since that is where the motor starts to go. This is one of the advantages over a standard throttle curve or using expo in the radio is you are not stuck with it starting at 0%.
Control Point 2 is set to take 20% Radio Throttle and change it to 18.5% ESC Throttle. At this Point, the offset between Radio Input and ESC Output starts to change. The 10 Control Points are now set as such:
Point 1 is set to 15% -> 15%
Point 2 is set to 20% -> 18.5%
Point 3 is set to 30% -> 23%
Point 4 is set to 40% -> 30%
Point 5 is set to 50% -> 40%
Point 6 is set to 60% -> 55%
Point 7 is set to 70% -> 70%
Point 8 is set to 80% -> 86%
Point 9 is set to 90% -> 91%
Point 10 is 100%
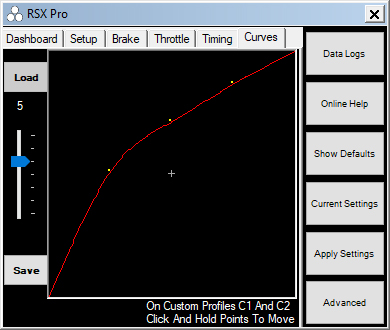
So what did all that actually do? It modified the incoming Radio Throttle signal every 10% to a new esc value, which smoothed out the throttle and gave me a more direct trigger-to-car feel.
How did I come to this conclusion? Track time. The 1/8 setups have aways felt a bit punchy to me, especially in the mid throttle area so I detuned that section from about 20% to 60%. 70-80% I felt there was a flat spot where the motor literally didn’t change much and that dead spot in the trigger was throwing off some of my jump distances. To combat that, I increased the ESC throttle output at that point, eliminating the dead spot. Basically we moved the extra punch in the lower throttle to the dead spot so the power is more consistent compared to the trigger.
Now that you have an idea of what this system actually does you can use it to tune anything to your liking for track conditions or driving style. This will be exceptionally helpful in drag racing if you’re tuning with your radio as it gives you complete control over the power delivery. Simply set your radio start and end points at the speed you like, then let this curve do the rest. Add as many points as you’d like up to 64 total and start really dialing in the throttle to come in exactly where and when you want it!