This page provides all the information that you will need to understand your Tekin Servo settings. This will be updated with any changes as needed. We will list the settings “per tab” as you go through the Tekin Hotwire Servo interface.


RESET: Clears and resets all settings back to Factory Defaults.
READ: Reads current servo settings. Any changes made will be reverted back to current settings if not saved first. You can use this to start over if you have made changes but have not saved them.
SAVE: Saves and changed values to the servo. This will flash if ANY changes have been made to any settings to let you know you need to save for the changes to write to the servo.

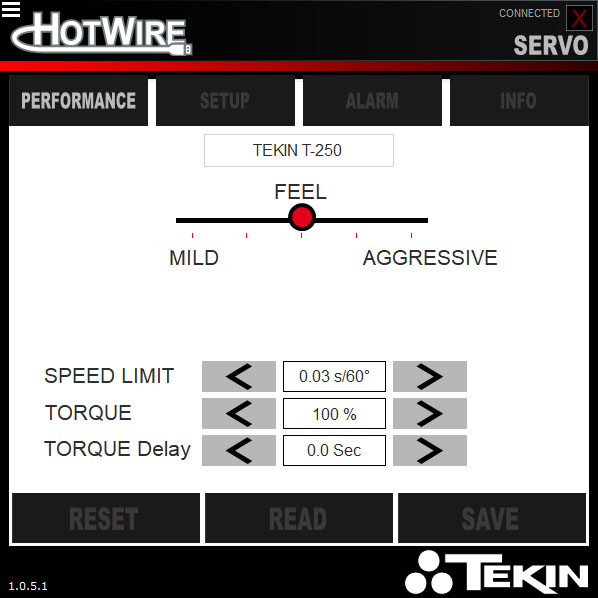
Feel: This changes how aggressive the servo holds position. Generally somewhere in the middle is where most will prefer. We have found that the more you get towards the "Aggressive" side the more twitchy the servo can be. This is a personal taste setting with no right or wrong answer.
Speed Limit: Speed Limit controls how fast your servo transition speed is. If you wish to slow your servo down you must set a value that is greater than the default transit speed. You cannot set your servo below its rated speed to make it quicker.
Torque: Set the desired amount you wish to reduce servo torque. Leave at 100% for maximum torque.
Torque Delay: Torque Delay is a programmed time allotment used to prevent servo failure. For example, if you set Torque Delay to .5sec you will get full torque for that amount of time and after the servo will reduce torque to the percentage set. If you set time to 0sec then the servo will always be limited to the torque percentage set.
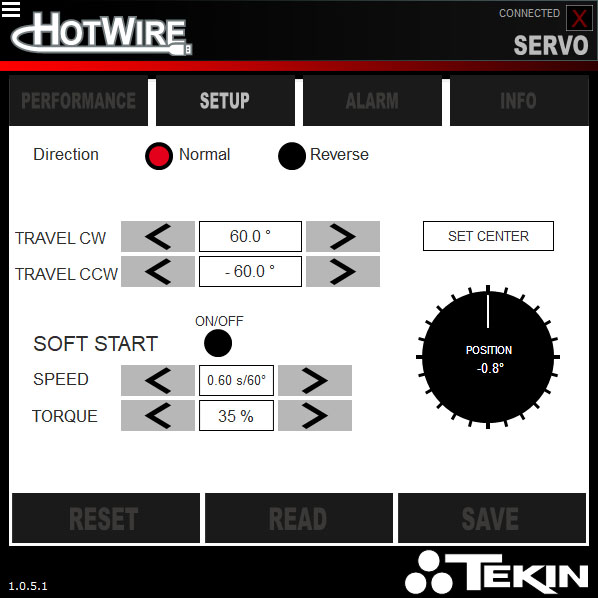
Direction: Allows you to change the servo direction. This can also be done on most radios.
Travel Settings: CW - Clockwise rotation. CCW - Counter-Clockwise rotation.
Travel allows you to send the servo end points or maximum travels. This is a unique feature as you would normally set the EPAs (end point adjustments) or Travel on your transmitter to limit the servo throw. Left and Right are usually never the same amounts of throw and it throws off your signal balance. For example, Right is limited 128 and Left is limited to 98. By setting the Travel on the servo itself, you can leave your transmitter settings at 100/100 and have a more balanced steering with greater resolution in adjustment if needed to fine tune the EPAs.
Set Center: Power up your servo and let it find natural center. Be sure your transmitter trim is also centered. Install the arm as close as possible to this center point in your vehicle. Connect the servo to the HotWire, straighten your wheels and hit 'Set Center' to save this as the new center position. You may still have to trim slightly on your transmitter as not all radios supply an exact center signal with trims at 0.
Soft Start: Soft Start allows you to limit the Torque and Speed at which the servo will center when you turn on your vehicle. Once center is reached, the servo will go to your set Torque and Speed on the Performance tab.
Position: The Position Dial shows current servo position in degrees both directions. Your Tekin servo can rotate up to 5 times or 1800 degrees in either direction while tracking position.

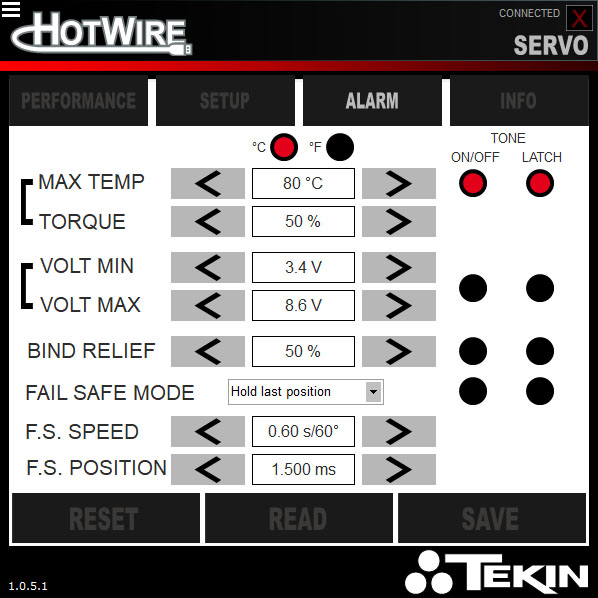
Alarm tones can be turned ON or OFF and be set to LATCH if desired.
C or F: You can choose Celsius or Fahrenheit units of temperature measurement.
ON/OFF: The ON/OFF setting allows you to engage an audible alarm tone emitted by the servo for each type of alarm. For example, losing radio signal with Fail Safe Mode Alarm set to ON would cause the servo alarm tone.
LATCH: Latch holds onto an alarm condition until power is cycled off and back on. For example, losing radio signal with a Fail Safe Mode Alarm set to ON and LATCH would cause the servo alarm tone to repeat even if radio signal is restored. If any set alarm triggers while also set to LATCH, the alarm will continue until power is cycled off and back on.
Max Temp: You can set thermal protection here. Set the maximum servo temperature and desired torque percentage. If the servo reaches this temperature, torque will be reduced to the set percentage.
Torque: This goes with Max Temp above and is the value the servo will limit to if the set Max Temp is reached. When the servo cools below the set Max Temp, full torque is restored.
Volt Min: The minimum voltage the servo will operate down to. If the voltage supplied drops below this set point, the servo will default to a motor free condition. All control is lost and the servo will not attempt to center.
Volt Max: The maximum voltage the servo will operate at. If the voltage supplied rises above this set point, the servo will cease to operate until the condition is corrected.
Bind Relief: Reduces the Torque by the percentage set when the servo senses it is in a bind condition for more than 2 seconds. If the servo cannot reach the current target position, Bind Relief activates and Torque is reduced until the servo senses movement.
Fail Safe Mode: Fail safe mode is only activated if radio signal is lost.
- Hold Last Position: Servo will hold the last known position provided by the radio system.
- Programmed Position: A set point you can program, often centered by default (1.5ms signal).
- Programmed with Speed: Same as above but with a programmed F.S. speed or fail safe speed setting. This can be slowed to bring the vehicle to a slow stop rather than abrupt stop.
- Motor Free: Disengages servo and provides 0% torque. Servo will not attempt to move at all.
- Motor Braking: Slows servo movement with a drag brake. Servo will not attempt to move at all.

Custom Name: You can give your Tekin servo a unique name! Keep track of which goes with which vehicle.
Serial #: For Tekin use. Write these down, if you ever lose your servo or vehicle it can help in identifying it!
Model #: The Model number of your servo.
On Time: Shows how long your servo has been on in its lifetime.
Run Time: Shows how much action your Tekin servo has seen. This only counts up when the servo is actively moving position. Idle time will increase the On Time.
Servo Version: The current firmware version in your servo. We update periodically and they are free to download!
Export/Import: You can save and load servo setting profiles just like our ESCs! Sharing your settings with friends is easy and fast.